Страница 4 из 7
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:14
michael-yurov
R6MF49T2 писал(а):
Сумма средних значений тока в обмотках + потери в драйвере = средний ток потребления драйвера с подключенным мотором.
Это грубая ошибка!
Ток в обмотках ни меет никакого отношения к току потребления драйвера!
Драйвер - это не линейный регулятор тока!
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:14
lkbyysq
elephant007 писал(а):драйвер в режиме микрошага будет пихать в обмотки не ток, а напряжение. Только не полное напряжением, а вот какое-то такое:

Конечно это не напряжение на обмотках. А драйвер будет прикладывать полное напряжение к обмоткам и следить за изменением тока в обмотке.
Сергей Саныч писал(а): То, что ты привел - это графики опорного напряжения, с которым драйвер сравнивает падение напряжения на токоизмерительных резисторах, чтобы обеспечить нужные токи в обмотках.
Да, это похоже на графики опорного напряжения.
Но, мужики! Там черным по белому написано IL-A и IL-B. Это ток в обмотках A и B!
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:20
Сергей Саныч
R6MF49T2 писал(а):Сумма средних значений тока в обмотках + потери в драйвере = средний ток потребления драйвера с подключенным мотором.
Пример: имеем драйвер, ШД и БП. У ШД две обмотки, сопротивлением по 1 Ом. Для простоты предположим, что ШД находится в режиме удержания (не вращается). Драйвер выдает в каждую обмотку по 3 ампера. Напряжение БП - 30 вольт.
Где должен быть командир? Какой ток будет потребляться драйвером от БП (без учета потерь в драйвере)?
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:27
lkbyysq
R6MF49T2 писал(а):Если в характеристиках драйвера заявлено 3А RMS на каждую обмотку, то драйвер с подключенным двигателем должен потреблять ток более 6A RMS. А в даташите его предлагают подключить к БП 4А.
Не более трех ампер на каждую обмотку, это верно.
Только драйвер никогда не дает одновременно по три ампера в каждую обмотку. Он так устроен.
Само понятие "драйвер дает ток в обмотку" не верно. Драйвер подает напряжение на обмотку и контролирует в ней ток. При этом он может:
1. Прикладывать к обмотке полное напряжение питания, которое получает от БП. Плюс на первый конец, минус на второй концы обмотки.
2. Прикладывать также полное напряжение к обмотке, но обратной полярности. Плюс на второй, минус на первый.
3. Закорачивать между собой оба конца обмотки.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:33
Сергей Саныч
lkbyysq писал(а):Только драйвер никогда не дает одновременно по три ампера в каждую обмотку. Он так устроен.
"Я не отдам Некту яблоко, хоть он дерись!"

Задача драйвера - обеспечить нужный ток в обмотке. Разумеется, у реального драйвера он не будет строго постоянным, а будет колебаться в некоторых заданных пределах с частотой ШИМ.
Но от того, что он будет колебаться, скажем, от 2,5 до 3,5 А, принципиально ничего не изменится. Повторяю, рассматриваем режим удержания, когда импульсы STEP на драйвер не поступают.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:35
lkbyysq
Спрятать надо это. Это все не так, типа слышал звон, да не знаю откуда он. Не надо это читать.
Сергей Саныч писал(а):Для простоты предположим, что ШД находится в режиме удержания (не вращается). Драйвер выдает в каждую обмотку по 3 ампера.
Не выдает.
В режиме полного шага - только на одну обмотку, вторая при этом обесточена.
В режиме полушага - либо как в первом случае, либо по половине в каждую обмотку.
В режиме 1/4. Либо как в первых двух, либо 3А*1/4 в одну и 3А*3/4 в другую.
И т.д.
Причем не просто постоянный ток, иначе якорь прилипнет к обмотке с бОльшим током. А поочередно поддергивает якорь то к одной обмотке, то к другой.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:35
R6MF49T2
michael-yurov писал(а):Это грубая ошибка!
Ток в обмотках ни меет никакого отношения к току потребления драйвера!
Драйвер - это не линейный регулятор тока!
Эм.... почему?
Что такое драйвер? По сути это два транзисторных моста и микроконтроллер который их переключает.
микроконтроллер открыл один мост, от источника потёк ток через обмотку двигателя (ток через индуктивность по экспоненте увеличивается). Как только ток достиг заданного значения мост закрылся, запасённая энергия в индуктивности рассасывается через резистор.... тут да,тока драйвер в этот момент потреблять почти не будет, но ток в обмотке течь будет, но мы не знаем как долго, это зависит от реализации драйвера и индуктивности мотора... хмм.... признаю, был не прав. В таком случае действительно посчитать необходимый БП мы не можем.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:40
Сергей Саныч
lkbyysq писал(а):Не выдает.
Выдает
Именно так реализуется "правильный" режим полного шага. По обеим обмоткам течет одинаковый (по абсолютному значению, конечно) ток.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:43
lkbyysq
Сергей Саныч писал(а):lkbyysq писал(а):Не выдает.
Выдает
Именно так реализуется "правильный" режим полного шага.
К первоисточнику плиз!
Классика полного шага.
Еще.Не. Картинку удалил, ибо лоханулся.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 11:59
lkbyysq
Был частично не прав. То, что я привел - это волновой метод управления ШД.
"Чаще всего используется управление с перекрытием фаз, когда в одно и то же время включены обе обмотки. В общем случае именно его и называют полношаговым режимом управления (англ. «full step mode» или «two-phase-on»)."
Буду рыть.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 12:01
Сергей Саныч
В современных драйверах полный шаг реализуется при работе двух обмоток одновременно. К примеру, на анимации, которую выкладывал Олег.
http://en.nanotec.com/typo3conf/ext/tv_ ... micro.html приведен именно такой режим (жмем кнопку Full). Ну и в даташитах реальных микросхем драйверов так расписано.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 12:13
lkbyysq
Вот две картинки.
С первой все понятно - волновое управление.

Вторая картинка - полный шаг.

Как заставить якорь стоять между двух катушек с одинаковым током? Он всегда прилипнет к одной из катушек, ведь сила взаимодействия двух магнитов тем выше, чем меньше расстояние между магнитами.
Драйвер контролирует ток, протекающий в обмотках и через него определяет положение ротора. Смещение ротора в сторону одной из катушек вызывает изменение тока в катушках за счет самоиндукции, драйвер ловит это изменение и временно отключает (закорачивает) обмотку, к которой устремился якорь. Чтобы такой принцип гарантированно работал, драйвер просто поочередно включает то одну, то другую обмотку, и если надо, сместить якорь, изменяет скважность импульсов напряжения. На ту обмотку, к которой устремился якорь, длину импульса напряжения уменьшает, на другую увеличивает. Якорь идет обратно и возвращается в среднюю точку.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 12:17
lkbyysq
Сергей Саныч писал(а):К примеру, на анимации, которую выкладывал Олег.
... в таблице справа внизу при полном шаге ток 71% в одну обмотку и 71% в другую.)))))
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 12:21
R6MF49T2
lkbyysq писал(а):Как заставить якорь стоять между двух катушек с одинаковым током? Он всегда прилипнет к одной из катушек.
Разве оно так? Якорь будет направлен по вектору магнитного поля. Вектор магнитного поля будет как раз между катушек.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 12:23
lkbyysq
Я поправил. Сила взаимодействия двух магнитов тем выше, чем меньше расстояние между магнитами. Стоит якорю стать ближе к одной из катушек, то расстояние до другой увеличится. Это как шарик на вершине горы, его во все стороны тянет одинаково и он неподвижен до тех пор, пока не подует легкий ветерок. Куда подул, туда и скатится шарик, ибо любое внешнее воздействие выводит его из состояния равновесия..
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 12:37
Сергей Саныч
lkbyysq писал(а):в таблице справа внизу при полном шаге ток 71% в одну обмотку и 71% в другую.)))))
Правильно. От максимального в данной схеме, который принят за 100%. А собственно, в чем проблема?
lkbyysq писал(а):Как заставить якорь стоять между двух катушек с одинаковым током? Он всегда прилипнет к одной из катушек.
Никуда он не прилипнет. Конструкция ШД такова, что якорь под воздействием полей двух катушек займет некоторое промежуточное положение, в соответствии с соотношением токов.
А если "прилипнет", то это неправильный ШД
lkbyysq писал(а):Это как шарик на вершине горы
При конструировании ШД стремятся такой ситуации всяко избегать, например, наклоном зубцов ротора относительно зубцов статора и другими конструктивными ухищрениями.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 12:38
R6MF49T2
lkbyysq писал(а):Я поправил. Сила взаимодействия двух магнитов тем выше, чем меньше расстояние между магнитами. Стоит якорю стать ближе к одной из катушек, то расстояние до другой увеличится. Это как шарик на вершине горы, его во все стороны тянет одинаково и он неподвижен до тех пор, пока не подует легкий ветерок. Куда подул, туда и скатится шарик, ибо любое внешнее воздействие выводит его из состояния равновесия..
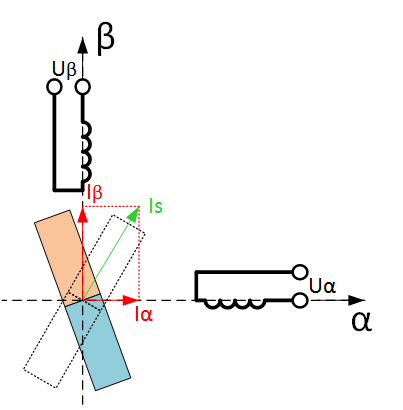
Посмотрим на следующий рисунок. В центре изображен магнит – ротор синхронного двигателя («стрелка» компаса), а по бокам два электромагнита – катушки, создающие каждая свое магнитное поле, одна в вертикальной оси, другая в горизонтальной.Магнитный поток катушки пропорционален току в ней (в первом приближении). Нас будет интересовать магнитный поток от статора в том месте, где расположен ротор, т.е. в центре рисунка (краевыми эффектами, рассеянием и всем прочим пренебрегаем). Магнитные потоки двух перпендикулярно расположенных катушек векторно складываются, образуя для взаимодействия с ротором один общий поток. Но так как поток пропорционален току в катушке, удобно рисовать непосредственно вектора токов, сонаправив их с потоком. На рисунке показаны некоторые токи Iα и Iβ, создающие магнитные потоки по осям α и β соответственно. Суммарный вектор тока статора Is создает сонаправленый ему магнитный поток статора. Т.е. по сути Is символизирует внешний магнит, который мы подносили к компасу, но созданный электромагнитами – катушками с током.
На рисунке ротор расположен в произвольном положении, но из этого положения ротор будет стремиться повернуться согласно магнитному потоку статора, т.е. по вектору Is (положение ротора в этом случае показано пунктирной линией). Соответственно, если подать ток только в фазу α, скажем, Iα = 1А, ротор встанет горизонтально, а если в β, вертикально, а если приложить Iβ = -1А то перевернется на 180 градусов. Если запитать ток Iα по закону синуса, а Iβ по закону косинуса от времени, то будет создано вращающееся магнитное поле. Ротор будет следовать за ним и крутиться (как стрелка компаса следует за вращением магнита руками). Это базовый принцип работы синхронной машины, в данном случае двухфазной с одной парой плюсов.
(С)
https://geektimes.ru/company/npf_vektor/blog/269486/
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 12:50
lkbyysq
R6MF49T2 писал(а):цитата
Не буду упираться, в руках надежных аргументов пока нет.
Есть только догадки типа "цитата верна в случае вращающегося магнитного поля". В статике по прежнему якорь прилипнет к одному из полюсов.
Но.
В электрических машинах есть во-первых инерция ротора, во вторых переменное напряжение. Это я к тому, что каждая катушка периодически перестает магнитить и отпускает ротор, ротор начинает движение и его подхватывает вращающееся поле. При вращающемся роторе мы рассматриваем действие на него суммы сил в каждый момент времени.
А вот стоит нам перестать вращать поле, как в системе появится два магнита, притягивающие третий. И каждый будет тянуть к себе. Суммарный вектор силы будет наклонен в сторону ближайшего магнита, куда и устремится не зафиксированный ротор.
Надо почитать про электрические машины подробнее.
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 12:51
Сергей Саныч
lkbyysq писал(а):Причем не просто постоянный ток, иначе якорь прилипнет к обмотке с бОльшим током. А поочередно поддергивает якорь то к одной обмотке, то к другой.
Да где вы такое взяли? Драйвер тупо держит заданные токи, а всякие противоЭДС, возникающие при повороте его интересуют ровно постольку, поскольку мешают этот ток поддерживать.
Речь про "обычные" драйверы, а не "продвинутые", типа цифровых Лидшайнов, там "не всё так однозначно".
Re: Расчет драйвера и БП, под конкретный двигатель.
Добавлено: 25 ноя 2016, 13:07
lkbyysq
Прикручиваем к столу два одинаковых магнита полюсами друг к другу. Берем стальной шарик и пытаемся расположить его посередине между магнитами. У меня лично не получится.
Саныч, дайте схему драйвера для обсуждения, чтобы не о разном говорить.