GRBL + Датчик касания (Touch Probe). Софт позиционирования?
Добавлено: 14 мар 2019, 08:58
Привет!
Мне необходимо фрезеровать заготовки, предварительно обработанные на токарнике (ну нет у меня 7-и координатного робота)
Для этого необходимо выставить инструмент, например, точно по центру заготовки в форме полого вертикального цилиндра.
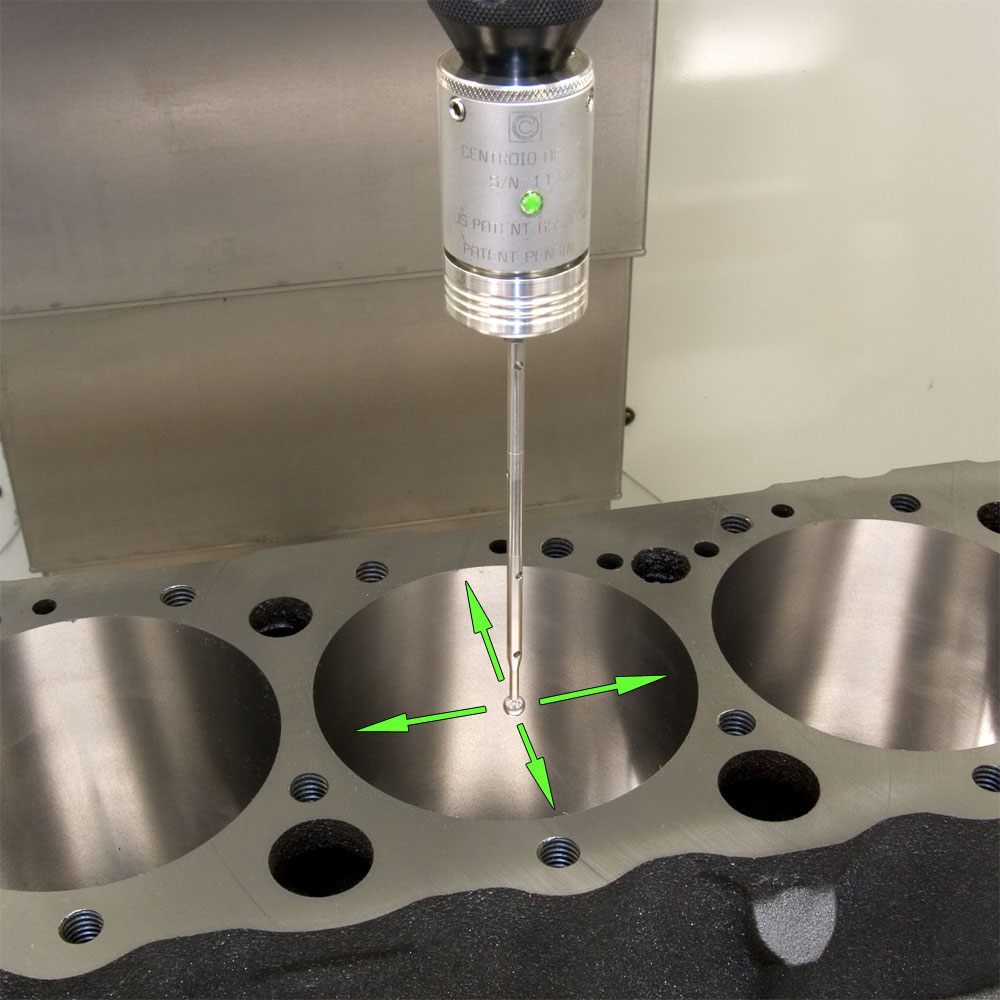
Предположим, я обзаведусь датчиком касания, как на фото
И я видел примеры, как в режиме поиска работают станки под управлением LinuxCNC или Mach3.
[youtube]https://youtu.be/dRfOBc8RB6o[/youtube]
Но я не нашел ни одной программы под GRBL-станки с такой функцией
Заранее благодарен за помощь!
Мне необходимо фрезеровать заготовки, предварительно обработанные на токарнике (ну нет у меня 7-и координатного робота)
Для этого необходимо выставить инструмент, например, точно по центру заготовки в форме полого вертикального цилиндра.
Предположим, я обзаведусь датчиком касания, как на фото
И я видел примеры, как в режиме поиска работают станки под управлением LinuxCNC или Mach3.
[youtube]https://youtu.be/dRfOBc8RB6o[/youtube]
Но я не нашел ни одной программы под GRBL-станки с такой функцией
Заранее благодарен за помощь!