Что то не выходит каменный цветок.
Настроил инишку под свой частотник. Подключил модуль, сгенерил и подключил панельку. Модуль подключается к частотнику, считывает текущую частоту и переводит ее в обороты, все правильно. Но вот обратно в частотник ничего не записывает от слова совсем.
Linuxcnc 2.8.1
custom.hal:
Код: Выделить всё
loadusr -W vfdmod --debug eg9600.ini
net spindle-cmd-rpm => vfdmod.spindle.rpm-in
net spindle-at-speed <= vfdmod.spindle.at-speed
net spindle-cw => vfdmod.control.run-forward
net spindle-ccw => vfdmod.control.run-reverse
custom_postgui.hal:
Код: Выделить всё
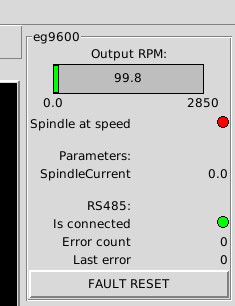
net spindle-rpm-out vfdmod.spindle.rpm-out => pyvcp.rpm-out
#net spindle-cmd-rpm vfdmod.spindle.rpm-out => pyvcp.rpm-out
net spindle-at-speed <= pyvcp.at-speed
# Communication
net pyvcp-is-connected vfdmod.rs485.is-connected => pyvcp.is-connected
net pyvcp-error-count vfdmod.rs485.error-count => pyvcp.error-count
net pyvcp-last-error vfdmod.rs485.last-error => pyvcp.last-error
loadrt oneshot names=fault-reset-delay
addf fault-reset-delay servo-thread
# Two seconds delay should be enough.
setp fault-reset-delay.width 2
net pyvcp-fault-reset-short pyvcp.fault-reset => fault-reset-delay.in
net pyvcp-fault-reset-long fault-reset-delay.out => vfdmod.control.fault-reset
Понимаю, что надо как то связать vfdmod с интерфейсом (axis) но вот как, не понятно.
Сигнала spindle-speed-cmd в основом hal файле у меня нет:
Код: Выделить всё
net spindle-cmd-rpm <= spindle.0.speed-out
net spindle-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-cmd-rps <= spindle.0.speed-out-rps
net spindle-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-at-speed => spindle.0.at-speed
Пробовал давать команды через MDI s1000 m3/4/5 ноль реакции, пробовал с панели "ручное управление" включать/выключать шпиндель, тоже ноль реакции. В дебаге при этом просто идет обмен с частотником (считывает обороты)
ЗЫ С линупсом на "Вы"




