Страница 2 из 2
Re: LinuxCNC 2.7
Добавлено: 26 мар 2016, 15:17
torvn77
UAVpilot писал(а): что в настройках рабочего стала отключено их отображение.

Тогда уж проще в хомяке скрытые каталоги и файлы посносить (начинаются с точки, например .config)
Естественно тогда не только настройки стола, но и другие настройки пользователя будут уничтожены.
Этого можно избежать снося каталоги и файлы выборочно, скорее что-то из нутра .config или .cache
Re: LinuxCNC 2.7
Добавлено: 31 мар 2016, 13:32
Nick
Re: LinuxCNC 2.7
Добавлено: 31 мар 2016, 13:35
_taras_
Ник! Твоя ссылка ведет на пустую страницу.
Re: LinuxCNC 2.7
Добавлено: 31 мар 2016, 16:40
Predator
_taras_ писал(а):Ник! Твоя ссылка ведет на пустую страницу.
Это не баг, это фича безопасности!

Re: LinuxCNC 2.7
Добавлено: 27 июн 2016, 20:48
nkp
работа над емс идет постоянно,но некоторые изменения требуют внимания:
https://forum.linuxcnc.org/forum/29-for ... ease#76714
Re: LinuxCNC 2.7
Добавлено: 27 июн 2016, 21:18
N1X
Я про это альтернативную ветвь и не слышал никогда
То что портальные станки с двумя приводами теперь заживут это приятный момент, теперь нужно изучать новую тему ) Непонятно только насколько будет отличаться пусконаладка )
Re: LinuxCNC 2.7
Добавлено: 14 июл 2016, 16:55
Nick
Я правильно понимаю, что теперь появятся отдельные пино под joint pos-сmd и axis pos-cmd?
Re: LinuxCNC 2.7
Добавлено: 15 июл 2016, 00:14
torvn77
А в чём разница между joint и axis?
Что одно мотор, а другое геометрическая абстракция я понимаю.
Re: LinuxCNC 2.7
Добавлено: 15 июл 2016, 06:49
N1X
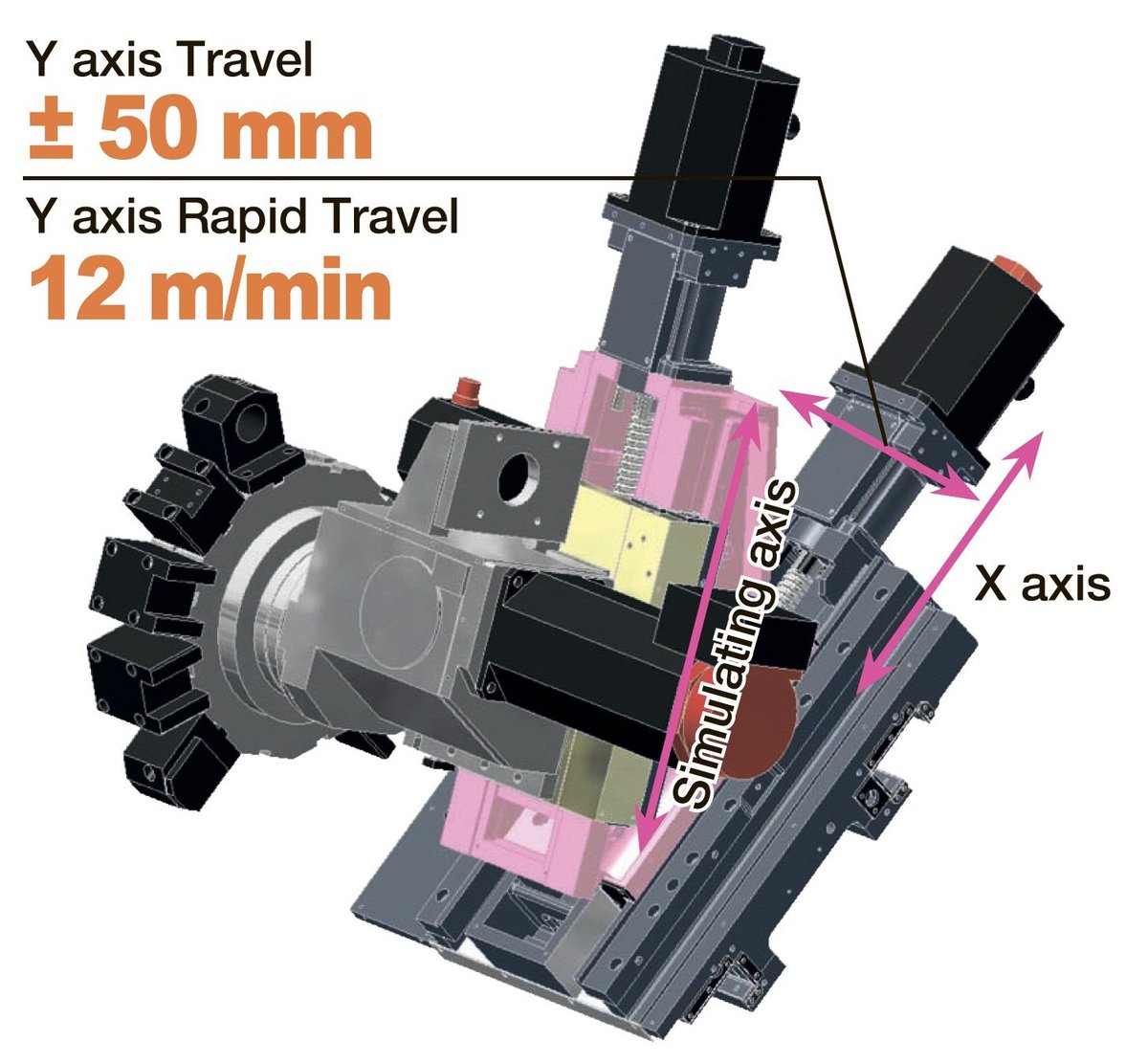
Joint - привод (сустав). Axis - ось. Ось может состоять из нескольких приводов. К примеру частый пример - токарный ОЦ с осью Y.
http://m.deg.ru/media/ib/1200/1/10e8776 ... 57f2d9.jpg
Физически привод оси Y не ортогонален оси X. Для перемещения по Y станок одновременно перемещает X (привод) и Y (привод). т.е. Когда движемся по Х - вращается двигатель Х, когда по Y - вращаются движки Х и Y. Вот такая вот кинематика...
Ну или у портального станка - на одну ось портала имеем 2 joint'a...
Re: LinuxCNC 2.7
Добавлено: 15 июл 2016, 12:52
torvn77
То есть axis это координата, а joint это команда мотору после преобразования координат кинематикой и по этому координату на stepgen правильно брать из joint?
Re: LinuxCNC 2.7
Добавлено: 05 июн 2017, 21:28
nkp
Код: Выделить всё
LinuxCNC 2.7.9 released
Sebastian Kuzminsky Sat, 03 Jun 2017 13:49:59 -0700
LinuxCNC 2.7.9 is released. This release fixes some obscure bugs and
adds a couple of new features:
* A driver for Mitsubishi VFDs.
* Support for "auxiliary applications", such as NativeCam, that are
distributed separately from LinuxCNC.
* Add a "Integrator's Manual", a work in progress with helpful
information on how to build your own CNC machine.
Special shout out to *two* first-time committers in this release (we
hope to see more of you in the future!):
* Alexander Brock
* Joe Hildreth
And as always, thanks to our awesome community of helpers and
bug-reporters, and to the usual list of long-time committers:
* Andy Pugh
* Chris Morley
* Chris Radek
* Dewey Garrett
* Jeff Epler
* John Thornton
* Jon Elson
* Norbert Schechner
* Sebastian Kuzminsky
The full changelog:
* support "auxiliary apps", distributed separately from LinuxCNC
* docs: add a bit more info to position feedback ini setting
* docs: sort board list in hm2_eth manpage
* docs: fix pyvcp multi label description
* docs: fix pyvcp example so it runs
* docs: clarify return value in hal_pin_new(3) manpage
* docs: add missing var section to index header
* docs: add machine building info to integrator document
* docs: add manpage for hal_parport realtime component
* docs: add units info to halui max-velocity pins in manpage
* docs: flesh out max-velocity pins in halui manpage
* docs: fix incorrect info for stat.motion_type and stat.motion_mode
* docs: code notes: a pose has 9 coordinates, not 6
* docs: add hal_manualtoolchange manpage
* docs: add info about remap debug messages
* docs: fix paraport/parport typos
* docs: fix pin names in thcud manpage example HAL config
* docs: clean up the note about T0 handling
* docs: add some info for the hal python module
* docs: clarify an ambiguity about siggen in the HAL documentation
* docs: add information about addf command in the HAL documentation
* docs: add details on epp_dir command line parameter of hal_ppmc
* docs: remove a footnote about the behavior of emc2 v2.4
* docs: add or2 example
* docs: fix description of USER_DEFINED_FUNCTION_MAX_DIRS in
ini-config
* docs: clarify g28/30 description
* docs: add link to G54-G59.3 User Coordinates section
* docs: clean up Machine Coordinate System section
* docs: remove M6 from modal group description
* docs: add links to machine origin from several places
* docs: fix typos and markup problems all over
* docs: add more information about the addf command
* docs: sorted gmoccapy video links with headlines
* docs: add a known problem with macros to gmoccapy docs
* docs: fix cut-n-paste bug in mb2hal manpage
* docs: expand on different ways of starting LinuxCNC
* docs: document some features of the Axis GUI
* docs: add info about the basic directory structure
* docs: correct misleading descriptions of named parameters
* docs: update info about 'save' command in halcmd manpage & help
* Axis GUI: avoid unbounded memory growth in text widgets on stretch
* Axis GUI: make tool info display widget larger
* Axis GUI: remove unused .info.offset widget
* Axis GUI: shorten tool touch off widget title text
* gmoccapy GUI: removed unused code
* gmoccapy GUI: added get_joints_amount() for compatibility 2.7 and
master
* gmoccapy GUI: new hal pin gmoccapy.ignore-limits
* gmoccapy GUI: bug if no macros in ini file
* gmoccapy GUI: bug in macro button handling
* gmoccapy GUI: G96 bug solved
* gscreen GUI: fix missing .themes folder error
* halui: fix halui.program.run
* gladeVCP: make CombiDRO compatible for both 2.7 and master
* gladeVCP: fix delta scale pin not updating if wheel scroll used
* gladeVCP: add missing icon image for hal_dial
* pncconf: fix spindle command using wrong signal name
* pncconf: fix sserial mode setting in HAL file
* hal_ppmc: add command line arg to turn on/off port direction change
* mitsub_vfd: add a driver for Mitsubishi VFDs
* classicladder: fix sequential variable access
* classicladder: fix whitespace errors
* ilowpass: round the output instead of truncating
* halcmd: waitusr: avoid race condition
* hm2: better error message on unexpected pin descriptors
* hm2_eth: don't segfault on interfaces without addresses
* linuxcnc python module: add doc string for stat.motion_mode
* linuxcnc python module: add doc string for stat.motion_type
* linuxcnc python module: add a doc string for
stat.queued_mdi_commands
* linuxcnc python module: add EMC_MOTION_TYPE_* constants
* hal python module: better doc strings for connect() and new_sig()
* Interp: fix a typo in a cutter-comp error message
* Task: set the stat struct member queuedMDIcommands
* example g-code: fix Z value reported by rectangle_probe.ngc
* example configs: fix hal pin names in gmoccapy_plasma
* example configs: limit led without off color in gmoccapy_plasma
* example configs: xhc-hb04.tcl: if prior connects, continue with msg
* rtapi: better error message when failing to connect
* uspace: allow calculated parameter array sizes
* tests: let introspection complete before continuing in the t0 tests
* tests: fixup hm2-idrom test to match new hm2 PD error message
* tests: add a test of ilowpass with low gain
* tests: reorg ilowpass test so i can add a low-gain test next to it
* tests: add a test of stat.queued_mdi_commands
* travis: manually uninstall gpl3 readline
* build: fix link error on i686 with gcc, or maybe objcopy 2.27
* packaging: add the new LinuxCNC_Integrator pdf to the doc package
--
Sebastian Kuzminsky
как обычно - исправления по мелочам...
вот прикрутили что то для сторонних программ(пока не понял - что это конкретно

)
* Support for "auxiliary applications", such as NativeCam, that are
distributed separately from LinuxCNC.
http://linuxcnc.org/docs/2.7/html/code/ ... nfigs.html
Re: LinuxCNC 2.7
Добавлено: 06 июн 2017, 01:41
Serg
nkp писал(а):вот прикрутили что то для сторонних программ(пока не понял - что это конкретно
)
Не, просто сделали переменные окружения, в которых можно указать список путей, где LinuxCNC будет искать конфиги/файлы этих приложений.
Раньше это легко решалось симлинками.
В остальном чистка кода и исправление мелких багов.
Из актуального для меня:
Пин gmoccapy.ignore-limits к которому можно прицепить соотв. "железную" кнопку.
Поправили баг с G96 в gmoccapy.
Re: LinuxCNC 2.7
Добавлено: 06 июн 2017, 13:30
MGG
А работу с двумя моторами на одну ось только к 2.8 прикрутят?
Re: LinuxCNC 2.7
Добавлено: 06 июн 2017, 15:04
Serg
MGG писал(а):А работу с двумя моторами на одну ось только к 2.8 прикрутят?
В стабильной 2.7 таких серьёзных изменений делать не будут. В ней только багфиксы допустимы.
Re: LinuxCNC 2.7
Добавлено: 06 янв 2020, 19:15
nkp
LinuxCNC 2.7.15 is out, the first release of 2020! This release contains a long list of bug fixes and improvements, all users of 2.7 are encouraged to upgrade. The highlights are:
* bug fixes in the Interpreter and Trajectory Planner
* bug fixes in some of the GUIs, config helpers, components, and docs
New contributors:
* Joseph Calderon
* Kurt Jacobson
* Lorenz Neureuter
* Rene Hopf
* Rick M
* Solitarily (David Shore)
* Will Glynn
And as always, a heart-felt Thank You to all the folks helping out in the forum and on IRC, and working on the exciting new features in as-yet-unreleased versions.
Here's to many more years of progress in LinuxCNC.
--
Sebastian Kuzminsky
Re: LinuxCNC 2.7
Добавлено: 25 сен 2020, 10:47
1240
вышел 2.8.0
под сетевые месы, кто нибудь устанавливал?
как мнение?
Re: LinuxCNC 2.7
Добавлено: 25 сен 2020, 11:47
iMaks-RS
Add a script to automatically update to the new INI file layout and new HAL pin names.
Mesa 7i96 support added
хм.. интересно.. упадёт ли после обновления настроенный RS485 до шпинделя
{kind=link}